In Search of an Understandable Consensus Algorithm (Extended Version)
Table of Contents
DECLARATION
This page is the In Search of an Understandable Consensus Algorithm (Extended Version) paper. Original Paper Link is: https://raft.github.io/raft.pdf
In Search of an Understandable Consensus Algorithm
(Extended Version)
Diego Ongaro and John Ousterhout
Stanford University
Abstract
Raft is a consensus algorithm for managing a replicated log. It produces a result equivalent to (multi-)Paxos, and it is as efficient as Paxos, but its structure is different from Paxos; this makes Raft more understandable than Paxos and also provides a better foundation for building practical systems. In order to enhance understandability, Raft separates the key elements of consensus, such as leader election, log replication, and safety, and it enforces a stronger degree of coherency to reduce the number of states that must be considered. Results from a user study demonstrate that Raft is easier for students to learn than Paxos. Raft also includes a new mechanism for changing the cluster membership, which uses overlapping majorities to guarantee safety.
1 Introduction
Consensus algorithms allow a collection of machines to work as a coherent group that can survive the failures of some of its members. Because of this, they play a key role in building reliable large-scale software systems. Paxos [15, 16] has dominated the discussion of consensus algorithms over the last decade: most implementations of consensus are based on Paxos or influenced by it, and Paxos has become the primary vehicle used to teach students about consensus.
Unfortunately, Paxos is quite difficult to understand, in spite of numerous attempts to make it more approachable. Furthermore, its architecture requires complex changes to support practical systems. As a result, both system builders and students struggle with Paxos.
After struggling with Paxos ourselves, we set out to find a new consensus algorithm that could provide a better foundation for system building and education. Our approach was unusual in that our primary goal was understandability: could we define a consensus algorithm for practical systems and describe it in a way that is significantly easier to learn than Paxos? Furthermore, we wanted the algorithm to facilitate the development of intuitions that are essential for system builders. It was important not just for the algorithm to work, but for it to be obvious why it works.
The result of this work is a consensus algorithm called Raft. In designing Raft we applied specific techniques to improve understandability,including decomposition (Raft separates leader election, log replication, and safety) and This tech report is an extended version of [32]; additional material is noted with a gray bar in the margin. Published May 20, 2014. state space reduction (relative to Paxos, Raft reduces the degree of nondeterminism and the ways servers can be inconsistent with each other). A user study with 43 students at two universities shows that Raft is significantly easier to understand than Paxos: after learning both algorithms, 33 of these students were able to answer questions about Raft better than questions about Paxos.
Raft is similar in many ways to existing consensus algorithms (most notably, Oki and Liskov's Viewstamped Replication [29, 22]), but it has several novel features:
1/. Strong leader: Raft uses a stronger form of leadership than other consensus algorithms. For example, log entries only flow from the leader to other servers. This simplifies the management of the replicated log and makes Raft easier to understand.
2/. Leader election: Raft uses randomized timers to elect leaders. This adds only a small amount of mechanism to the heartbeats already required for any consensus algorithm, while resolving conflicts simply and rapidly.
3/. Membership changes: Raft's mechanism for changing the set of servers in the cluster uses a new joint consensus approach where the majorities of two different configurations overlap during transitions. This allows the cluster to continue operating normally during configuration changes.
We believe that Raft is superior to Paxos and other consensus algorithms, both for educational purposes and as a foundation for implementation. It is simpler and more understandable than other algorithms; it is described completely enough to meet the needs of a practical system; it has several open-source implementations and is used by several companies; its safety properties have been formally specified and proven; and its efficiency is comparable to other algorithms.
The remainder of the paper introduces the replicated state machine problem (Section 2), discusses the strengths and weaknesses of Paxos (Section 3), describes our general approach to understandability (Section 4), presents the Raft consensus algorithm (Sections 5–8), evaluates Raft (Section 9), and discusses related work (Section 10).
2 Replicated state machines
Consensus algorithms typically arise in the context of replicated state machines [37]. In this approach, state machines on a collection of servers compute identical copies of the same state and can continue operating even if some of the servers are down. Replicated state machines are used to solve a variety of fault tolerance problems in distributed systems. For example, large-scale systems that have a single cluster leader, such as GFS [8], HDFS [38], and RAMCloud [33], typically use a separate replicated state machine to manage leader election and store configuration information that must survive leader crashes. Examples of replicated state machines include Chubby [2] and ZooKeeper [11].
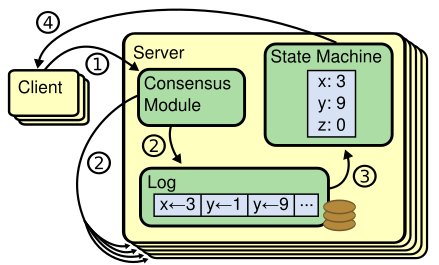
Figure 1: Replicated state machine architecture. The consensus algorithm manages a replicated log containing state machine commands from clients. The state machines process identical sequences of commands from the logs, so they produce the same outputs.
Replicated state machines are typically implemented using a replicated log, as shown in Figure 1. Each server stores a log containing a series of commands, which its state machine executes in order. Each log contains the same commands in the same order, so each state machine processes the same sequence of commands. Since the state machines are deterministic, each computes the same state and the same sequence of outputs.
Keeping the replicated log consistent is the job of the consensus algorithm. The consensus module on a server receives commands from clients and adds them to its log. It communicates with the consensus modules on other servers to ensure that every log eventually contains the same requests in the same order, even if some servers fail. Once commands are properly replicated, each server's state machine processes them in log order, and the outputs are returned to clients. As a result, the servers appear to form a single, highly reliable state machine.
Consensus algorithms for practical systems typically have the following properties:
• They ensure safety (never returning an incorrect result) under all non-Byzantine conditions, including network delays, partitions, and packet loss, duplication, and reordering.
• They are fully functional (available) as long as any majority of the servers are operational and can communicate with each other and with clients. Thus, a typical cluster of five servers can tolerate the failure of any two servers. Servers are assumed to fail by stopping; they may later recover from state on stable storage and rejoin the cluster.
• They do not depend on timing to ensure the consistency of the logs: faulty clocks and extreme message delays can, at worst, cause availability problems.
• In the common case, a command can complete as soon as a majority of the cluster has responded to a single round of remote procedure calls; a minority of slow servers need not impact overall system performance.
3 What's wrong with Paxos?
Over the last ten years, Leslie Lamport's Paxos protocol [15] has become almost synonymous with consensus: it is the protocol most commonly taught in courses, and most implementations of consensus use it as a starting point. Paxos first defines a protocol capable of reaching agreement on a single decision, such as a single replicated log entry. We refer to this subset as single-decree Paxos. Paxos then combines multiple instances of this protocol to facilitate a series of decisions such as a log (multi-Paxos). Paxos ensures both safety and liveness, and it supports changes in cluster membership. Its correctness has been proven, and it is efficient in the normal case.
Unfortunately, Paxos has two significant drawbacks. The first drawback is that Paxos is exceptionally difficult to understand. The full explanation [15] is notoriously opaque; few people succeed in understanding it, and only with great effort. As a result, there have been several attempts to explain Paxos in simpler terms [16, 20, 21]. These explanations focus on the single-decree subset, yet they are still challenging. In an informal survey of attendees at NSDI 2012, we found few people who were comfortable with Paxos, even among seasoned researchers. We struggled with Paxos ourselves; we were not able to understand the complete protocol until after reading several simplified explanations and designing our own alternative protocol, a process that took almost a year.
We hypothesize that Paxos' opaqueness derives from its choice of the single-decree subset as its foundation. Single-decree Paxos is dense and subtle: it is divided into two stages that do not have simple intuitive explanations and cannot be understood independently. Because of this, it is difficult to develop intuitions about why the single-decree protocol works. The composition rules for multi-Paxos add significant additional complexity and subtlety. We believe that the overall problem of reaching consensus on multiple decisions (i.e., a log instead of a single entry) can be decomposed in other ways that are more direct and obvious.
The second problem with Paxos is that it does not provide a good foundation for building practical implementations. One reason is that there is no widely agreed-upon algorithm for multi-Paxos. Lamport's descriptions are mostly about single-decree Paxos; he sketched possible approaches to multi-Paxos, but many details are missing. There have been several attempts to flesh out and optimize Paxos, such as [26], [39], and [13], but these differ from each other and from Lamport's sketches. Systems such as Chubby [4] have implemented Paxos-like algorithms, but in most cases their details have not been published.
Furthermore, the Paxos architecture is a poor one for building practical systems; this is another consequence of the single-decree decomposition. For example, there is little benefit to choosing a collection of log entries independently and then melding them into a sequential log; this just adds complexity. It is simpler and more efficient to design a system around a log, where new entries are appended sequentially in a constrained order. Another problem is that Paxos uses a symmetric peer-to-peer approach at its core (though it eventually suggests a weak form of leadership as a performance optimization). This makes sense in a simplified world where only one decision will be made, but few practical systems use this approach. If a series of decisions must be made, it is simpler and faster to first elect a leader, then have the leader coordinate the decisions.
As a result, practical systems bear little resemblance to Paxos. Each implementation begins with Paxos, discovers the difficulties in implementing it, and then develops a significantly different architecture. This is timeconsuming and error-prone, and the difficulties of understanding Paxos exacerbate the problem. Paxos' formulation may be a good one for proving theorems about its correctness, but real implementations are so different from Paxos that the proofs have little value. The following comment from the Chubby implementers is typical:
There are significant gaps between the description of the Paxos algorithm and the needs of a real-world system. . . . the final system will be based on an unproven protocol [4].
Because of these problems, we concluded that Paxos does not provide a good foundation either for system building or for education. Given the importance of consensus in large-scale software systems, we decided to see if we could design an alternative consensus algorithm with better properties than Paxos. Raft is the result of that experiment.
4 Designing for understandability
We had several goals in designing Raft: it must provide a complete and practical foundation for system building, so that it significantly reduces the amount of design work required of developers; it must be safe under all conditions and available under typical operating conditions; and it must be efficient for common operations. But our most important goal—and most difficult challenge was understandability. It must be possible for a large audience to understand the algorithm comfortably. In addition, it must be possible to develop intuitions about the algorithm, so that system builders can make the extensions that are inevitable in real-world implementations.
There were numerous points in the design of Raft where we had to choose among alternative approaches. In these situations we evaluated the alternatives based on understandability: how hard is it to explain each alternative (for example, how complex is its state space, and does it have subtle implications?), and how easy will it be for a reader to completely understand the approach and its implications?
We recognize that there is a high degree of subjectivity in such analysis; nonetheless, we used two techniques that are generally applicable. The first technique is the well-known approach of problem decomposition: wherever possible, we divided problems into separate pieces that could be solved, explained, and understood relatively independently. For example, in Raft we separated leader election, log replication, safety, and membership changes.
Our second approach was to simplify the state space by reducing the number of states to consider, making the system more coherent and eliminating nondeterminism where possible. Specifically, logs are not allowed to have holes, and Raft limits the ways in which logs can become inconsistent with each other. Although in most cases we tried to eliminate nondeterminism, there are some situations where nondeterminism actually improves understandability. In particular, randomized approaches introduce nondeterminism, but they tend to reduce the state space by handling all possible choices in a similar fashion ("choose any; it doesn't matter"). We used randomization to simplify the Raft leader election algorithm.
5 The Raft consensus algorithm
Raft is an algorithm for managing a replicated log of the form described in Section 2. Figure 2 summarizes the algorithm in condensed form for reference, and Figure 3 lists key properties of the algorithm; the elements of these figures are discussed piecewise over the rest of this section.
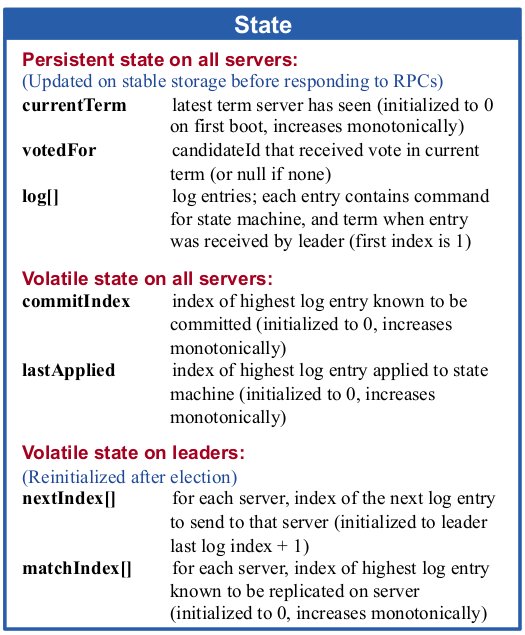

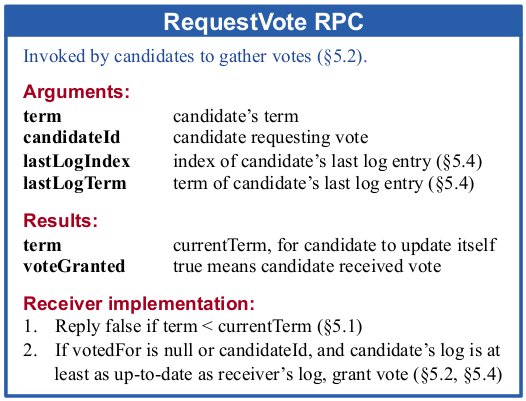
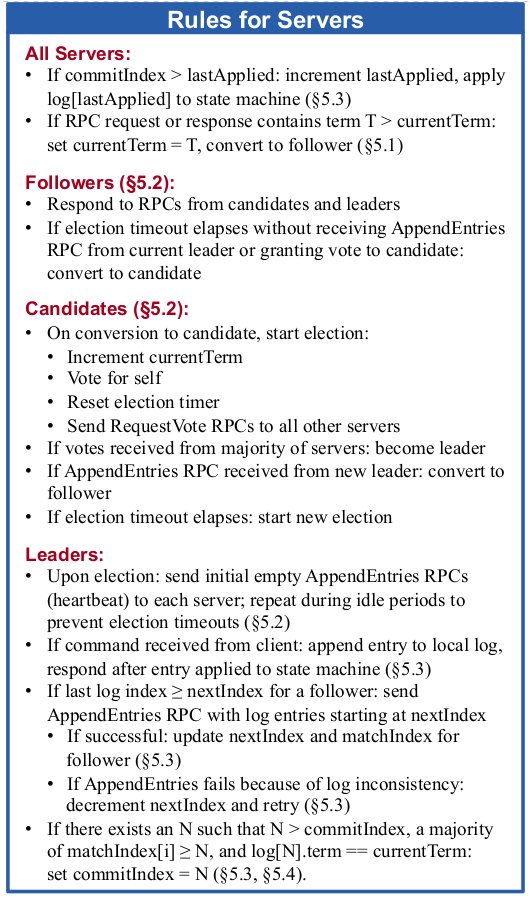
Figure 2: A condensed summary of the Raft consensus algorithm (excluding membership changes and log compaction). The server behavior in the upper-left box is described as a set of rules that trigger independently and repeatedly. Section numbers such as §5.2 indicate where particular features are discussed.A formal specification [31] describes the algorithm more precisely.
Raft implements consensus by first electing a distinguished leader, then giving the leader complete responsibility for managing the replicated log. The leader accepts log entries from clients, replicates them on other servers, and tells servers when it is safe to apply log entries to their state machines. Having a leader simplifies the management of the replicated log. For example, the leader can decide where to place new entries in the log without consulting other servers, and data flows in a simple fashion from the leader to other servers. A leader can fail or become disconnected from the other servers, in which case a new leader is elected.
Given the leader approach, Raft decomposes the consensus problem into three relatively independent subproblems, which are discussed in the subsections that follow:
• Leader election: a new leader must be chosen when an existing leader fails (Section 5.2).
• Log replication: the leader must accept log entries from clients and replicate them across the cluster, forcing the other logs to agree with its own (Section 5.3). • Safety: the key safety property for Raft is the State Machine Safety Property in Figure 3: if any server has applied a particular log entry to its state machine, then no other server may apply a different command for the same log index. Section 5.4 describes how Raft ensures this property; the solution involves an additional restriction on the election mechanism described in Section 5.2.
After presenting the consensus algorithm, this section discusses the issue of availability and the role of timing in the system.
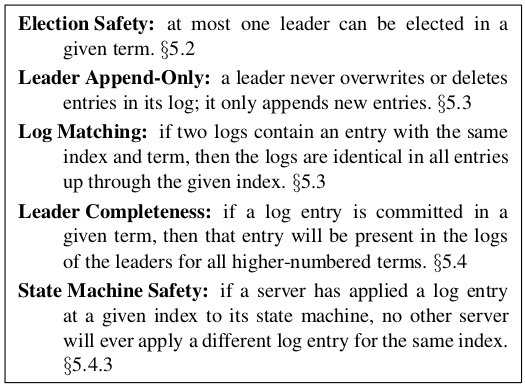
Figure 3: Raft guarantees that each of these properties is true at all times. The section numbers indicate where each property is discussed.
5.1 Raft basics
A Raft cluster contains several servers; five is a typical number, which allows the system to tolerate two failures. At any given time each server is in one of three states: leader, follower, or candidate. In normal operation there is exactly one leader and all of the other servers are followers. Followers are passive: they issue no requests on their own but simply respond to requests from leaders and candidates. The leader handles all client requests (if a client contacts a follower, the follower redirects it to the leader). The third state, candidate, is used to elect a new leader as described in Section 5.2. Figure 4 shows the states and their transitions; the transitions are discussed below.
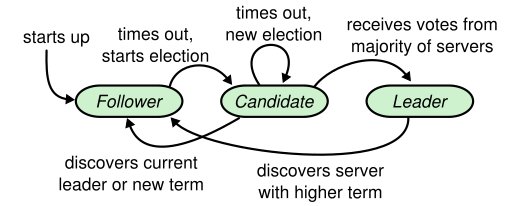
Figure 4: Server states. Followers only respond to requests from other servers. If a follower receives no communication, it becomes a candidate and initiates an election. A candidate that receives votes from a majority of the full cluster becomes the new leader. Leaders typically operate until they fail.
Raft divides time into terms of arbitrary length, as shown in Figure 5. Terms are numbered with consecutive integers. Each term begins with an election, in which one or more candidates attempt to become leader as described in Section 5.2. If a candidate wins the election, then it serves as leader for the rest of the term. In some situations an election will result in a split vote. In this case the term will end with no leader; a new term (with a new election) will begin shortly. Raft ensures that there is at most one leader in a given term.

Figure 5: Time is divided into terms, and each term begins with an election. After a successful election, a single leader manages the cluster until the end of the term. Some elections fail, in which case the term ends without choosing a leader. The transitions between terms may be observed at different times on different servers.
Different servers may observe the transitions between terms at different times, and in some situations a server may not observe an election or even entire terms. Terms act as a logical clock [14] in Raft, and they allow servers to detect obsolete information such as stale leaders. Each server stores a current term number, which increases monotonically over time. Current terms are exchanged whenever servers communicate; if one server's current term is smaller than the other's, then it updates its current term to the larger value. If a candidate or leader discovers that its term is out of date, it immediately reverts to follower state. If a server receives a request with a stale term number, it rejects the request.
Raft servers communicate using remote procedure calls (RPCs), and the basic consensus algorithm requires only two types of RPCs. RequestVote RPCs are initiated by candidates during elections (Section 5.2), and AppendEntries RPCs are initiated by leaders to replicate log entries and to provide a form of heartbeat (Section 5.3). Section 7 adds a third RPC for transferring snapshots between servers. Servers retry RPCs if they do not receive a response in a timely manner, and they issue RPCs in parallel for best performance.
5.2 Leader election
Raft uses a heartbeat mechanism to trigger leader election. When servers start up, they begin as followers. A server remains in follower state as long as it receives valid RPCs from a leader or candidate. Leaders send periodic heartbeats (AppendEntries RPCs that carry no log entries) to all followers in order to maintain their authority. If a follower receives no communication over a period of time called the election timeout, then it assumes there is no viable leader and begins an election to choose a new leader.
To begin an election, a follower increments its current term and transitions to candidate state. It then votes for itself and issues RequestVote RPCs in parallel to each of the other servers in the cluster. A candidate continues in this state until one of three things happens: (a) it wins the election, (b) another server establishes itself as leader, or (c) a period of time goes by with no winner. These outcomes are discussed separately in the paragraphs below.
A candidate wins an election if it receives votes from a majority of the servers in the full cluster for the same term. Each server will vote for at most one candidate in a given term, on a first-come-first-served basis (note: Section 5.4 adds an additional restriction on votes). The majority rule ensures that at most one candidate can win the election for a particular term (the Election Safety Property in Figure 3). Once a candidate wins an election, it becomes leader. It then sends heartbeat messages to all of the other servers to establish its authority and prevent new elections.
While waiting for votes, a candidate may receive an AppendEntries RPC from another server claiming to be leader. If the leader's term (included in its RPC) is at least as large as the candidate's current term, then the candidate recognizes the leader as legitimate and returns to follower state. If the term in the RPC is smaller than the candidate's current term, then the candidate rejects the RPC and continues in candidate state.
The third possible outcome is that a candidate neither wins nor loses the election: if many followers become candidates at the same time, votes could be split so that no candidate obtains a majority. When this happens, each candidate will time out and start a new election by incrementing its term and initiating another round of RequestVote RPCs. However, without extra measures split votes could repeat indefinitely.
Raft uses randomized election timeouts to ensure that split votes are rare and that they are resolved quickly. To prevent split votes in the first place, election timeouts are chosen randomly from a fixed interval (e.g., 150–300ms). This spreads out the servers so that in most cases only a single server will time out; it wins the election and sends heartbeats before any other servers time out. The same mechanism is used to handle split votes. Each candidate restarts its randomized election timeout at the start of an election, and it waits for that timeout to elapse before starting the next election; this reduces the likelihood of another split vote in the new election. Section 9.3 shows that this approach elects a leader rapidly.
Elections are an example of how understandability guided our choice between design alternatives. Initially we planned to use a ranking system: each candidate was assigned a unique rank, which was used to select between competing candidates. If a candidate discovered another candidate with higher rank, it would return to follower state so that the higher ranking candidate could more easily win the next election. We found that this approach created subtle issues around availability (a lower-ranked server might need to time out and become a candidate again if a higher-ranked server fails, but if it does so too soon, it can reset progress towards electing a leader). We made adjustments to the algorithm several times, but after each adjustment new corner cases appeared. Eventually we concluded that the randomized retry approach is more obvious and understandable.
5.3 Log replication
Once a leader has been elected, it begins servicing client requests. Each client request contains a command to be executed by the replicated state machines. The leader appends the command to its log as a new entry, then issues AppendEntries RPCs in parallel to each of the other servers to replicate the entry. When the entry has been safely replicated (as described below), the leader applies the entry to its state machine and returns the result of that execution to the client. If followers crash or run slowly, or if network packets are lost, the leader retries AppendEntries RPCs indefinitely (even after it has responded to the client) until all followers eventually store all log entries.

Figure 6: Logs are composed of entries, which are numbered sequentially. Each entry contains the term in which it was created (the number in each box) and a command for the state machine. An entry is considered committed if it is safe for that entry to be applied to state machines.
Logs are organized as shown in Figure 6. Each log entry stores a state machine command along with the term number when the entry was received by the leader. The term numbers in log entries are used to detect inconsistencies between logs and to ensure some of the properties in Figure 3. Each log entry also has an integer index identifying its position in the log.
The leader decides when it is safe to applyy a log en- try to the state machines; such an entry is called commit- ted. Raft guarantees that committed entries are durable and will eventually be executed by all of the available state machines. A log entry is committed once the leader that created the entry has replicated it on a majority of the servers (e.g., entry 7 in Figure 6). This also commits all preceding entries in the leader's log, including entries created by previous leaders. Section 5.4 discusses some subtleties when applying this rule after leader changes, and it also shows that this definition of commitment is safe. The leader keeps track of the highest index it knows to be committed, and it includes that index in future AppendEntries RPCs (including heartbeats) so that the other servers eventually find out. Once a follower learns that a log entry is committed, it applies the entry to its local state machine (in log order). We designed the Raft log mechanism to maintain a high level of coherency between the logs on different servers. Not only does this simplify the system's behavior and make it more predictable, but it is an important component of ensuring safety. Raft maintains the following proper- ties, which together constitute the Log Matching Property in Figure 3: